
Tandbergi lintmakile uus elektroonika
10-03-2016

Eellugu
See oli millalgi 2015 aasta sügisel. Avastasin, et ühes eesti elektroonikafoorumis müüdi juba pikemat aega omaaegset reporterimakki Tandberg 11, aga huvi kellelgi polnud. Kui hind langes 30 euroni, otsustasin ära osta. Esialgu oli eesmärgiks originaalilähedane taastamine ja tööleseadmine .
Paraku selgus pärast esimest sisselülitamist, et helipead olid oma aja ära elanud, samas mehaanika kummidetailid olid nn „enam-vähem“. Umbes tund aega see makk töötas sellisena, nagu oli, siis hakkasid ükshaaval üles ütlema võimendi transistorid. Tõenäoliselt aeg tegi oma töö. Mõtlesin, et parandamise asemel võiks teha asjast elulooma.
Tehnilised parameetrid
| Nimikiirused | 19.05 cm/s | 9.53 cm/s |
| Detonatsioon * | 0.15% | 0.25% |
| Sagedusala (+/- 3dB)** | 30..19500 Hz | 30…12000 Hz |
| Müratase taasesitusel*** | -59 dB | -56 dB |
| Müratase läbivkanalis*** | -53 dB | -47 dB |
| Sisendpinged | 5 mV, 100 mV |
| Väljundpinge | 500 mV täisnivoo |
| Eelmagneetimissagedus | 100 kHz |
| Toitepinge | 9…15 V või 220V |
* magnetofoni originaalparameetritest
** kasutatud lint LPR35 , tootja RMG/Pyral tootmisaasta 2015
***patareitoitel
Struktuurskeem
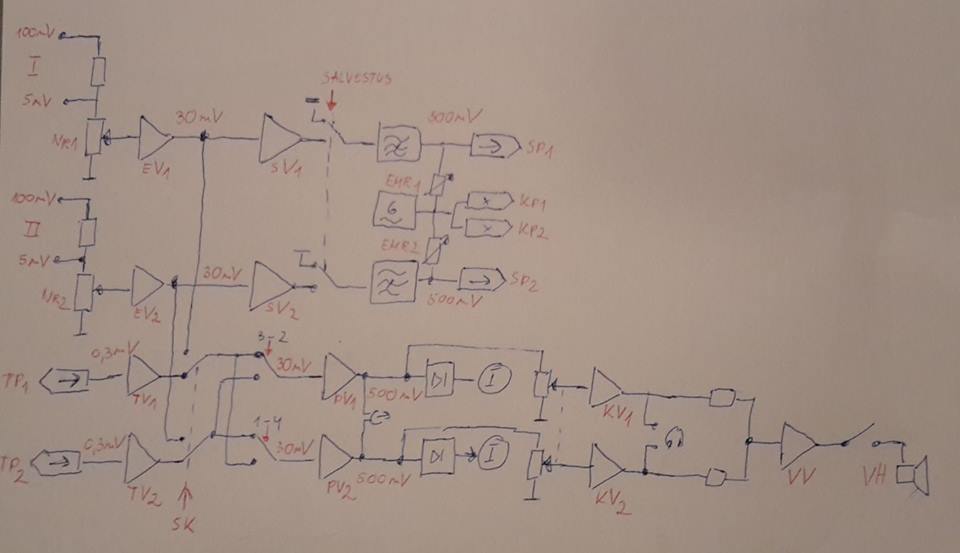
Skeemi koostamisel on lähtutud põhimõttest – tulgu võimalikult lihtne ja andku samas häid tulemusi. Õnneks tänapäevane elemendibaas seda võimaldab. Magnetofon evib eraldi salvestus ja taasesituskanalit, ehk eraldi salvestus ning taasesituspead ja võimendeid. Mõlemad võimendid on kahekanalilised.
Magnetofonil on kaks sisendit-madalpingelilne ,5mV tundlikkusega ja kõrgemapingeline, tundlikkusega 100 mV. Signaal läbib salvestusnivoo regulaatoreid ja läbib eelvõimendeid EV , kus signaal võimendatakse tasemeni 30 mV . Sellele järgneb salvestusvõimendi SV ja samaaegselt on võimalik ka läbi relee SK (salvestuse kontroll) suunata signaal kontrollkuulamiseks. Salvestusvõimendi annab signaalile salvestuseks sobiva sageduskarakteristiku. Salvestusvõimendi väljundis on relee,mis rakendub salvestusrežiimi valimisel ja ühendab salvestuspea võimendi väljundiga. Taasesitusrežiimis on salvestuspea lühistatud. Enne salvestuspeasse jõudmist läbib signaal tõkkefiltri, mis tõkestab eelmagneetimisvoolu jõudmist võimendi väljundisse. Eelmagneetimis- ja kustutusvool tekitatakse kõrgsagedusgeneraatoriga, mille võnkesagedus on 100 kHz.
Taasesitamisel võimendatakse signaal taasesitusvõimendis, mis lisaks annab ka sellele ka standardkorrektsiooni, tasemeni 30 mV Sealt edasi satub signaal läbi relee SK ja taasesitusradade releede pingevõimendisse, kus see võimendatakse tasemeni 500 mV . Relee SK abil on võimalik valida, kas väljundisse satub signaal taasesituspeast või sisendist ja sellega on võimalik salvestusrežiimis võimalik võrrelda salvestatud ja salvestamata signaali.
Et jälgida signaalide nivood,on pingevõimendi väljunditesse ühendatud nivooindikaatorid, mis näitavad , sõltuvalt relee SK asendist ,kas salvestava või taasesitava signaali taset.
Lisaks liiniväljundise on magnetofonil olemas kõrvaklapivõimendi koos vastava väljundiga ning sisevaljuhääldi kasutamise tarbeks võimsusvõimendi.
Elektriskeemid
Kogu elektroonika on paigaldatud kolmele suurele trükkplaadile ja kahele väikesele montaažplaadile.
 |  |  |
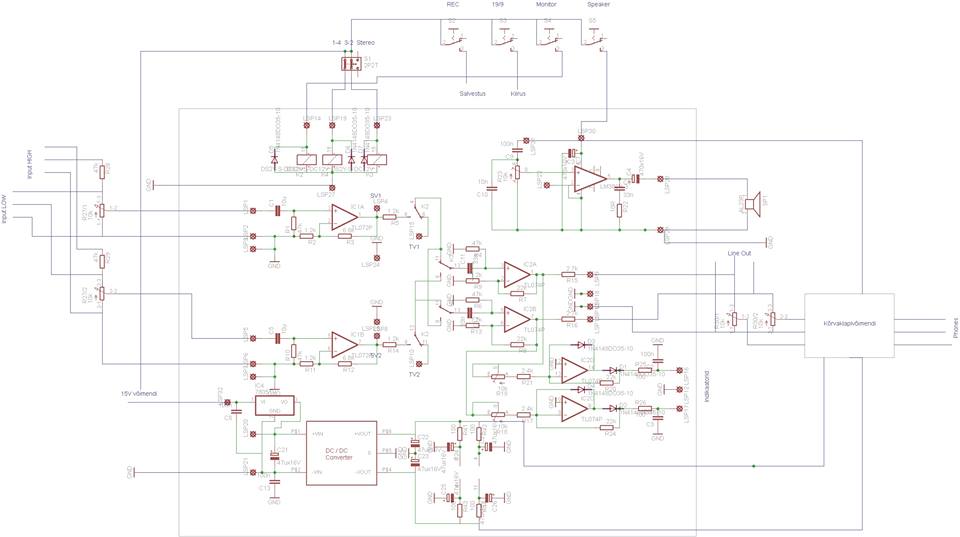
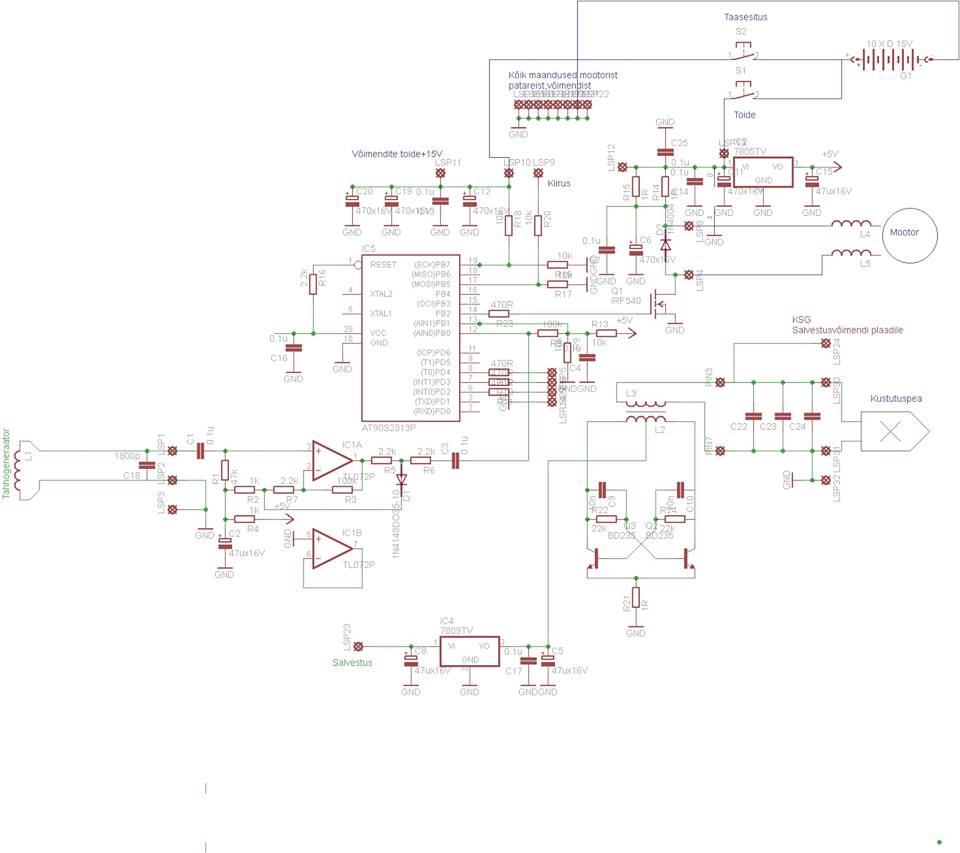
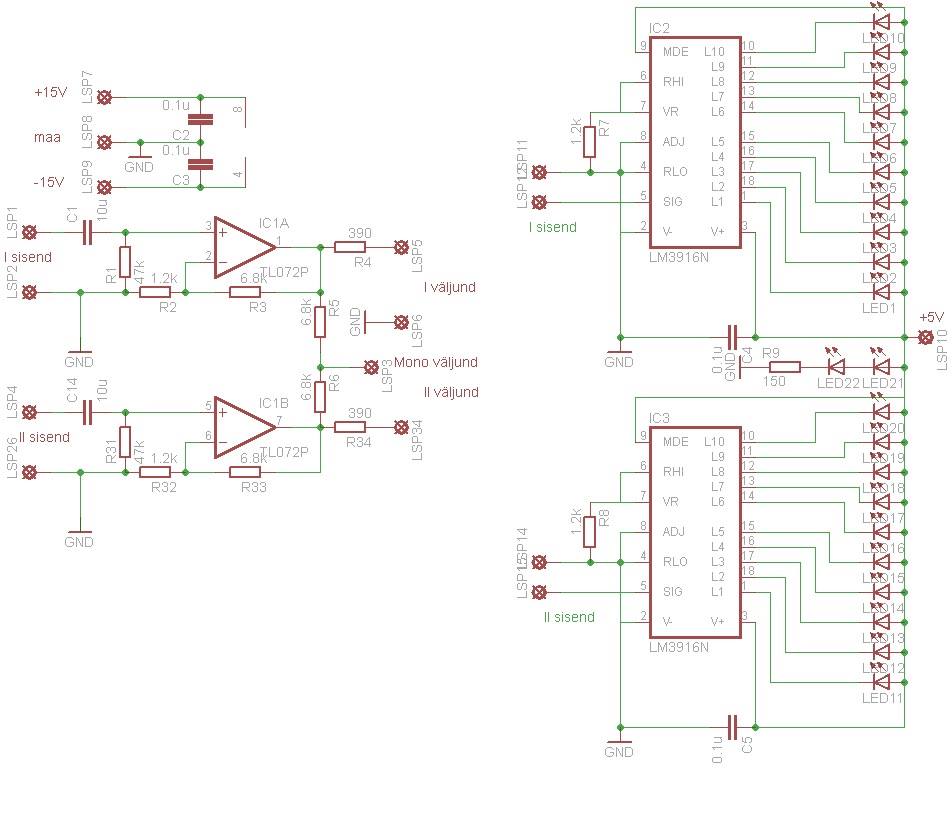
1. Sisendvõimendi,väljundvõimendi , võimsusvõimendi ,indikaatori alaldi ja kanalite ning sisend-väljund kommutaator. Võimendid on klassikalises,mitteinverteerivas lülituses ja on mõeldud pingete sobitamiseks salvestus-taasesitusvõimendi plaadiga.
2. Salvestus-taasesitusvõimendi. Sisaldab kaks sagedusest sõltuva tagasisidega võimendit salvestuseks ja taasesituseks. Salvestusvõimendi väljundis on lisaks relee, mis salvestusrežiimis ühendab võimendi väljundi salvestuspeaga. Sisend – väljundpinged on suurusjärgus 30 mV
3. Mootori pöörlemiskiiruse stabilisaator ja kõrgsagedusgeneraator. Kui kõrgsagedusgeneraator on klassikalise skeemi järgi, siis mootori juhtlülitus on kirjeldatud allpool .
4. Kõrvaklapivõimendi. Mitteinverteerivas lülituses tavaline opvõimendiga pingevõimendi.
5. Nivooindikaator. Kasutusel on ribaindikaatori lülitused LM3916 baasil. Monteeritud endise nivooindikaatori korpusesse.
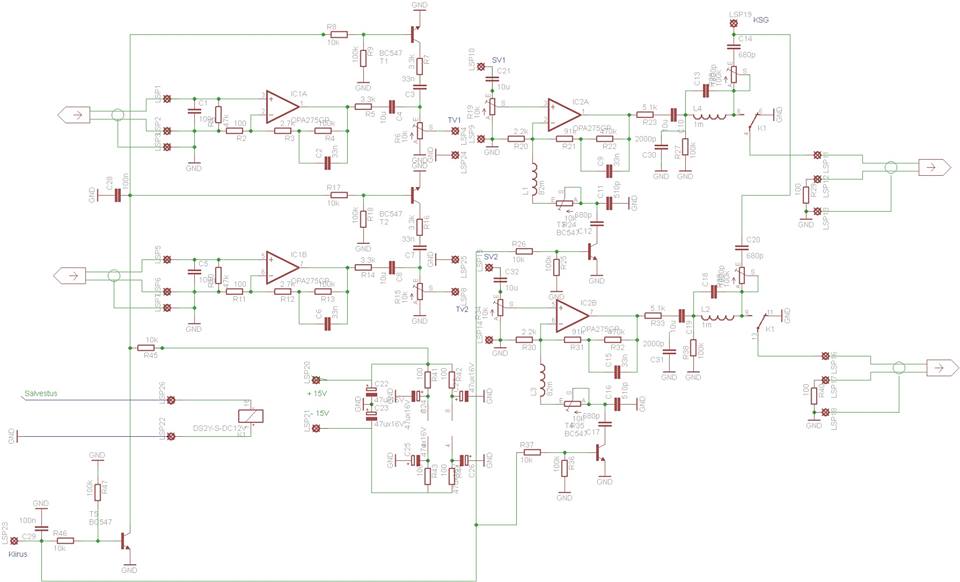
Salvestusvõimendi
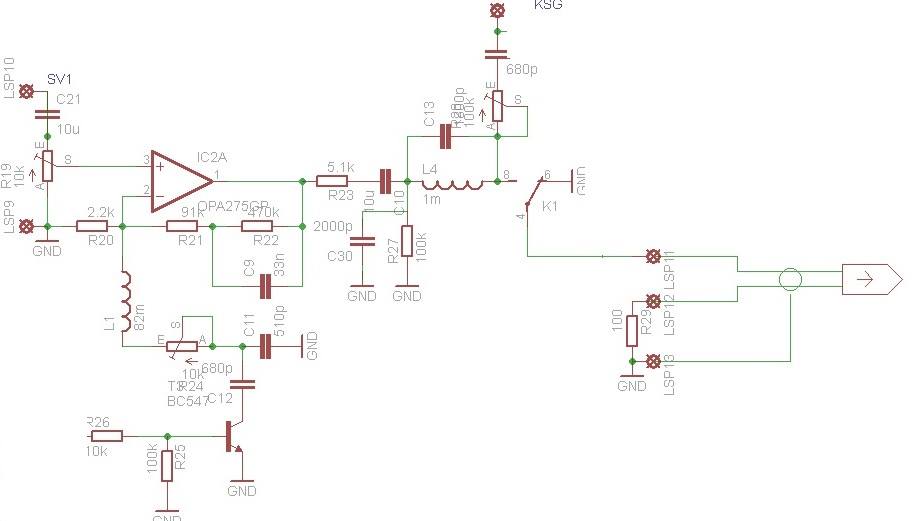
Salvestusvõimendi võimendab salvestamisel signaali vajaliku tasemeni, teeb sageduskorrektsiooni ning sobitab väljundi salvestuspeaga. Näitena on toodud ühe kanali võimendi. Sisendis on seadetakisti R19,millega saab välja reguleerida salvestusnivoo ning võrdsustada see stereokanalite vahel. Kuna salvestamisel vajab signaal korrektsiooni, siis osaliselt tehakse see tagasisides. Elemendid R21 ja C9 suurendavad võimendi võimendust sagedutel alla 100 Hz ja jadavõnkering L1 ja C11,kiirusel 9 ka C12 tõstavad võimendust kõrgetel sagedustel . Kiirusel 19 – 20 kHz,kiirusel 9 14 kHz . Tõus madalatel sagedustel on vajalik seleks, et taasesituskanali võimendus kahaneb vastavalt standardile alla 100 Hz (ajakonstandi osa 3150 uS – 50Hz murdesagedus). Kõrgeid sagedusi tõstetakse, sest salvestusel liituv eelmagneetimisvool omab teatavat kustutustoimet eriti kõrgetel sagedustel. Võimendi väljundiks on induktiivne koormus – salvestuspea. Tänu induktiivsusele suureneb selle takistus sageduse tõustes,järelikult on sageduskarakteristikul veel langus. Selle kompenseerimiseks on salvestusvõimendi väljundtakistus suhteliselt suur (R23) ja kõrgete sageduste tõstmiseks on kasutatud jadavõnkeringi , kuhu kuuluvad mahtuvus C30 ja salvestuspea induktiivsus (20 mH). Signaali teekonnal paiknev rööpvõnkering L4, C13 on tõkkefilter,mis takistab eelmagneetimisvoolu leviku võimendi väljundisse. Võimendi väljundis on relee K1,mis lülitab salvestuspea võimendi väljundisse vaid salvestusrežiimis. Salvestuspea on vene päritolu 6A24.080
Taasesitusvõimendi
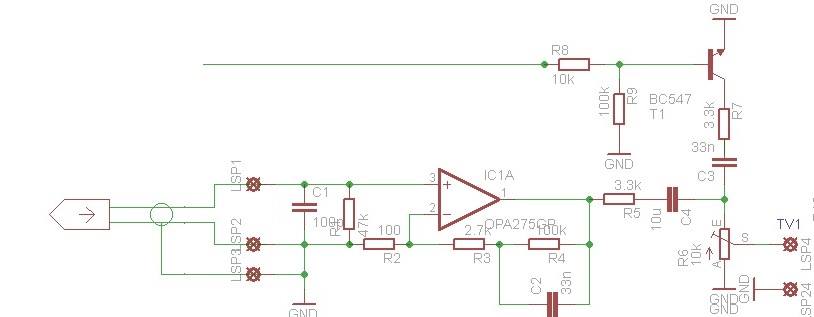
Taasesitusvõimendi võimendab taaesitamisel taasesituspeast saabuva signaali (0,3 mV) tasemeni 30 mVning teeb sageduskorrektsiooni. Taasesituspea on ühendatud operatsioonvõimendiga otse,ilma sidestuskondensaatorita. Selline ühendusviis parandab ülekannet madalatel sagedustel ja vähendab mürataset. Taasesituspeaga on paralleelselt kondensaator C1,mis moodustab paralleelvõnkeringi sagedusel 20 kHz (mahtuvuse tegelik väärtus on leitud katseliselt ja see on 620 pF) Takisti R1 on pea väljundtakistuse sobitamiseks.Taasesituspeaks on universaalpea 6D24.051. Signaali kadu võrreldes „päris“ taasesituspeaga on suhteliselt olematu, sest oma parameetritelt läheneb universaalpea taasesituspeale (suur induktiivsus ,väike tööpilu), Võimendina on kasutusel madala müratasemega helitehnikasse sobiv operatsioonvõimendi OPA275GP. Signaali põhikorrektsioon (3150uS+90 uS) kiirusel 9 on saavutatud tagasiside elementide R3,R4 ja C2 väärtuste valikuga. Kiirusel 19 peab olema ajakonstant 50uS (NAB standard) . Sellega sarnane sageduskarakteristik saavutatakse kõrgetel sagedustel toimiva pingejaguriga R5, R7, C3. Võimendi väljundis on seadetakisti R6,millega võrdsustatakse kanalite väljundpinged.
Mootori juhtlülitus
Kui muudes magnetofoni sõlmedes on kasutatud suhteliselt levinud skeemilahendusi, siis täiesti erinev on mootorijuhtlülitus (skeem on eespool).
Mootori pöörlemissageduse stabiliseerimine on tehtud mikrokontrolleriga. Mootor onlisaks muule mehaanikale sidestatud hammasrattaga,millelt indutseeritakse pöörlemissagedusega võrdelise sagedusedusega signaal tahhoandurisse. See võimendatakse eelvõimendis IC1A ja piiratakse dioodiga D1. Edasi satub signaal mikrokontrollerisse Attiny2313, kus võrreldakse tahhoandurist saabuva signaali perioodi sisemise taimeri loendustulemusega. Vastavalt nende väärtuste erinevusele suurendatakse või vähendatakse mootori juhtimiseks kasutatava PWM signaali harvendustegurit. Antud lülitus suudab hoida lindiveokiiruse konstantne kiirusel 19 alates toitepingest 9 V.Kiirusel 9 on vajalik minimaalne toitepinge 6V.
Mikrokontroller tegeleb ka toitepinge väärtuse kaudse mõõtmisega. Nimelt muutub PWM juhtsignaali harvendustegur toitepinge muutumisel. Seda väärtust kasutatakse valgusdioodide, mis näitavad toite kvaliteeti, juhtimiseks.

Video:
Viimased
2013-03-11 21:07:59
2013-03-11 21:08:06
2013-03-11 21:08:55
2013-03-11 21:09:04
2013-03-11 21:09:11