
Mikrokontrollersüsteemide kasutajaliideste ABC – valgusdioodid, nihkeregistrid ja piesosummer
Sissejuhatus
Tugeva elektroonika või elektrotehnika taustata õppuritel jääb tänapäeva keerukate lülituselementide tööpõhimõte sageli arusaamatuks. Lihtsamaid elektrilülitusi võib üritada kirjeldada mehaaniliste elementidena, kuid seegi võib elektriala eelteadmistega õppuritel tunduda kummaline. Lihtsamaid lülitusi saab kirjeldada lihtsustatult matemaatiliste funktsioonidega, näiteks loogikaelementide funktsiooniplokkidega (NING, VÕI, EI). Kuid mida teha sisemiste tagasisidedega elektrilülitustega? Sageli tuleb ikkagi vaadata ploki (nt. KMOP tehnoloogia abil teostatud trigeri) tegelikku elektrilülitust transistoride tasemel.
Kuidas transistori tööpõhimõtet lihtsustatult kirjeldada. Youtube-st võib leida head videomaterjali. Näiteks
Thomas Schwenke: How Field-Effect transistors work?
Veritasium: How does a Transistor work?
Elektroonika algteadmistega õppuritel sellega ilmselt probleeme ei teki. Trigeri mudelit võib lihtsustada ja koostada elektriahela kohta kontakt-aseskeem. Sel juhul ei teki ka algteadmistega tudengitel arusaamisega raskusi. Relee- ja kontaktorlülituste kogemustega elektriala inimesed mõistavad sedalaadi ahelaid sageli paremini kui loogikafunktsiooni-plokkidega kirjeldusi.
Funktsionaalseid lülitusi ja trigereid tutvustatakse koos protsessorite ehitusega. Mida kasutada või aluseks võtta?
Toodetes on kõige laiemalt on levinud odavad mikrokontrollerid – juhtimisloogika madal hind on see, mis teeb paljud rakendused üldse võimalikuks. Teisalt, jõupooljuhtmuundurite juhtimisel vajatakse sageli suure arvutusjõudlusega signaaliprotsessoreid (DSP). Jõupooljuhttehnika rakendamisel jõuelektroonikas on oluliseks osaks digitaalne signaalitöötlus ja signaaliprotsessorid. Millist seadet kasutada? Algõppe puhul ei ole olulist vahet – peamine et seade oleks töökindel ja tarkvara lollikindel! Tarkvara osas on püütud tööd erinevatel platvormidel ühtlustada, sest erinevate arenduskeskkondade kasutamine tekitaks palju segadust ja muudaks juhendamise keerukamaks.
Õppeotstarbelised seadmed
Virumaa Kolledžis on kasutusel firma ITT Group moodulid – kõik kolm robootika kodulabori põlvkonda. Peamiselt leiavad kasutust ATmega2561 ja ATxmega128A1U mikrokontrollerplaadid. Kasutaja jaoks pole nende kahe erinevused mitte protsessoris vaid lisaseadmete toimimispõhimõttes. Atmega mikrokontrollerite kasutamisel tuleb rööpvärati väljundregistri üksikute kohtade oleku muutmiseks teha loogikatehteid NING ja VÕI mitmekohaliste kahendarvudega ehk nn. maskidega. Xmega mikrokontrolleritel on sisseehitatud lülitused (wired-AND ja wired OR) mis teevad neidsamu tehteid elektriahelatega ning juhtimisprogramm on seetõttu lihtsam ning kiirem.
Peamiselt leiavad kasutust ATmega2561 ja ATxmega128A1U mikrokontrollerplaadid. Kasutaja jaoks pole nende kahe erinevused mitte protsessoris vaid lisaseadmete toimimispõhimõttes. Atmega mikrokontrollerite kasutamisel tuleb rööpvärati väljundregistri üksikute kohtade oleku muutmiseks teha loogikatehteid NING ja VÕI mitmekohaliste kahendarvudega ehk nn. maskidega. Xmega mikrokontrolleritel on sisseehitatud lülitused (wired-AND ja wired OR) mis teevad neidsamu tehteid elektriahelatega ning juhtimisprogramm on seetõttu lihtsam ning kiirem.
{kind=link}
{kind=link}
Rühma saab jagada kaheks – ühele poolele ülel tunnil üks mikrokontrolleri tüüp, teisele teine mikrokontrolleri tüüp. Rühma tükeldamine motiveerib rühma liikmeid iseseisvalt töötama ja paindlikumalt mõtlema. Võib tekkida isegi väike konkurents kahe rühma vahel – kumb saab enne lülituse tööle. Seadmete riistvara tehnilised erinevused rikastavad kui need ei ole liigsuured.
Aine sisuks pole rakendused ega programmeerimine vaid elektroonikaseadme funksionaalne sisu st. lülitused. Protsessorseadmeid ei saa kasutada programmita, seega tekib kohe küsimus, mis programmeerimiskeelt kasutada ja kuidas? Valida on seadme käsustikuga seotud Assemblerkeele ja standardsete kõrgkeelte vahel. Kõrgkeeled on kergesti vastuvõetavad eeldusel, et õppurid on juba põhikoolis ja gümnaasiumiastmes programmeerimisega kokku puutunud. Alustuseks on võimalikult elmentaarsete loogikatehetega näited programmeerimiskeeles C, millest saab vajadusel ka automaatselt assemlerkeelse programmi riistvarale lähemale sukeldumiseks. Millistes kohtades veel assemblerkeelt võib vaja minna? Ikka nendes, kus programmi töötluse iga takt või mikrosekund mõjutab seadme tehnilist keerukust ja maksumust. See ongi põhjus miks odavate mikrokontrollerite asemel kasutatakse jõupooljuhtmuundurite juhtimisel lisaks ka programmeeritavaid loogikalülitusi (CPLD, FPGA jt.).
Pärast tutvumist kasutatava aparatuuriga, mille oluliseks osaks on elektrilülituste skeemid, saab õppur asuda seadmega midagi praktilist tegema. Võimalikud näited ei sõltu nüüd enam protsessoriplaadist vaid kasutajaliidese füüsilisest ülesehitusest st. valmisseadmetest, mida saab sellega ühendada. Olemegi jõudnud valgusdioodideni ja seejärel keerukamate juhtimislülitusteni nende tüürimiseks – nihkeregistriteni. Plaatidel on nihkeregistriga tüürlülitus A6275 mida saab kasutada konstantse voolu allikana valgusdioodide tüürimiseks.
{kind=link}
Struktureeritud skeemitähised
Lihtsamatel plokkskeemidel on konstantse vooluga tüürahelat A6275 kujutatud ristkülikukujulise plokina. Tehnilisse dokumentatsiooni vaadates selgub, et lülitus on tegelikult kolmeastmeline sisaldades endas nii nihkeregistrit, lukkregistrit (D-latch) kui ka konstantse väljundvooluga tüürlülitust. Struktureeritud IEC 60617 skeemitähis annab sedalaadi lülituse funktsionaalsest sisust palju parema ülevaate, kui tühi ristkülikukujuline skeemitähis.
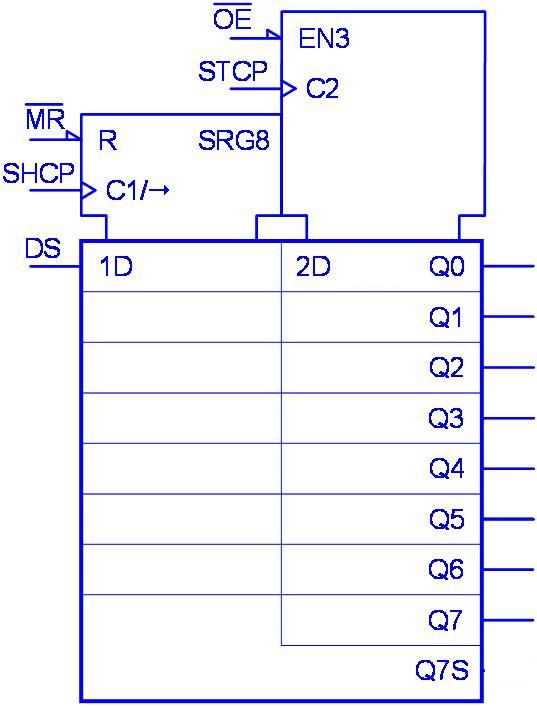
Joonis 1. Nihkeregistri-lukkregistri kombineeritud lülituse võimalik IEC 60617 skeemitähis
Struktureeritud skeemitähs on jagatud kaheks osaks millest esimene kirjeldab nihkeregistrit ja teine lukkregistrit. Kummalgi poolel on eraldatud andmeosa (sisendis infoosa ja väljundis jõuosa) ja juhtimisosa (ülal). Mõlemat osa juhitakse signaalifrondiga, sellele viitavad kolmnurgad taktsisenditel C1 ja C2 (vt joonis 1). Struktureeritud skeemitähis ei kajasta lülituse elektrilisi omadusi, nendesse süvenemiseks on vaja lugeda lülituse tehnilist dokumentatsiooni ja see on hoopis teiste õppeainete teema. Tegemist lihtsalt kahe registri jadalülitusega vaid väljundregistril on ka eriotstarbeline väljundahelate tüürlülitus. Valgusdioode võimalik lülitada väga erineval viisil. Mõndel lülitustel on võimalik lülitada ka märgatavalt kõrgemat pinget kui lülituse enda toitepinge.
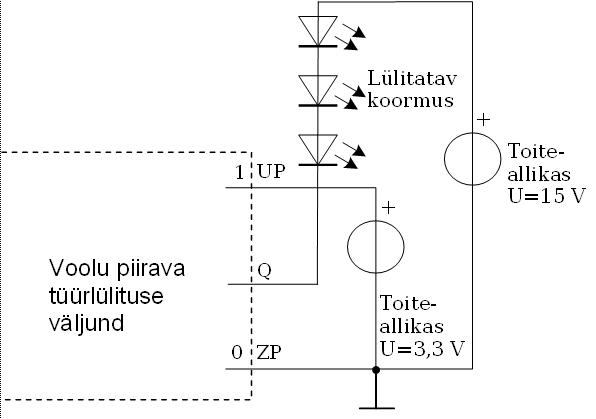
Joonis 2. Avatud kollektori või avatud neeluga tüürahel
Valmisplokkide kasutamiseks ei ole vaja elektri- ja elektroonikaalaseid teadmisi, küll aga ühenduste tegemisel. Riistvaralähedane programmeerimine eeldab samuti elektrilülituste tööpõhimõttest arusaamist. Maailma erinevates maades ja firmades on kasutusel mitmeid erinevaid tähistusstandardeid ja palju erienvaid skeemitähiseid mis võivad kirjldada ühte ja sama objekti. Tegemist on suhtlusvahendiga millel on palju erinevaid vorme nagu paljude murretege inimeleeltel.
Kokkuvõte
Robootika kodulaborid on peale Kohtla-Järvel paikneva TTÜ Virumaa Kolledži kasutusel ka mujal Eestis. Võib eeldada et elektrilähedane st. elektrilülituse tööpõhimõtet kirjeldav metoodika on kasutatav ka iseõppimisel. Algajatel on valmisnäiteid märgatavalt lihtsam kombineerida ja kohandada kui neid nullist ise koostada. Seepärast on nihkeregistri (ja sinna ühendatud valgusdioodide) juhtimsieks praktikumi õppematerjalide hulgas valmis programminäited (HomeLAB II, HomeLAB III). Teadmisi ja oskusi omandavad tudengid ise, tunnid saavad õppimise protsessis vaid toeks olla.