Ehita endale mini-joonejärgimisrobot
Peale Robotex 2013 võistlusel “Punamütsikesega” osalemist olen poole silmaga pilku peal hoidnud joonejärgijatel. Hiljuti jäi silma üks mõnusalt mini Instructable veebilehele tekkinud ja analoogelektroonikal baseeruv joonejärgimisrobot. Muide analoogelektroonikal on oma kirjeldamatud võlud! Midagi lihtsamat on keeruline välja mõelda… tegelikult üks variant on. Teha asi ära ühe LEDi, fotosensori, op-võimendi ja kahe mootoriga. Sellise roboti ehitamisega saab küll vist pea igaüks hakkama… nii, et kohtume Robotexil :).

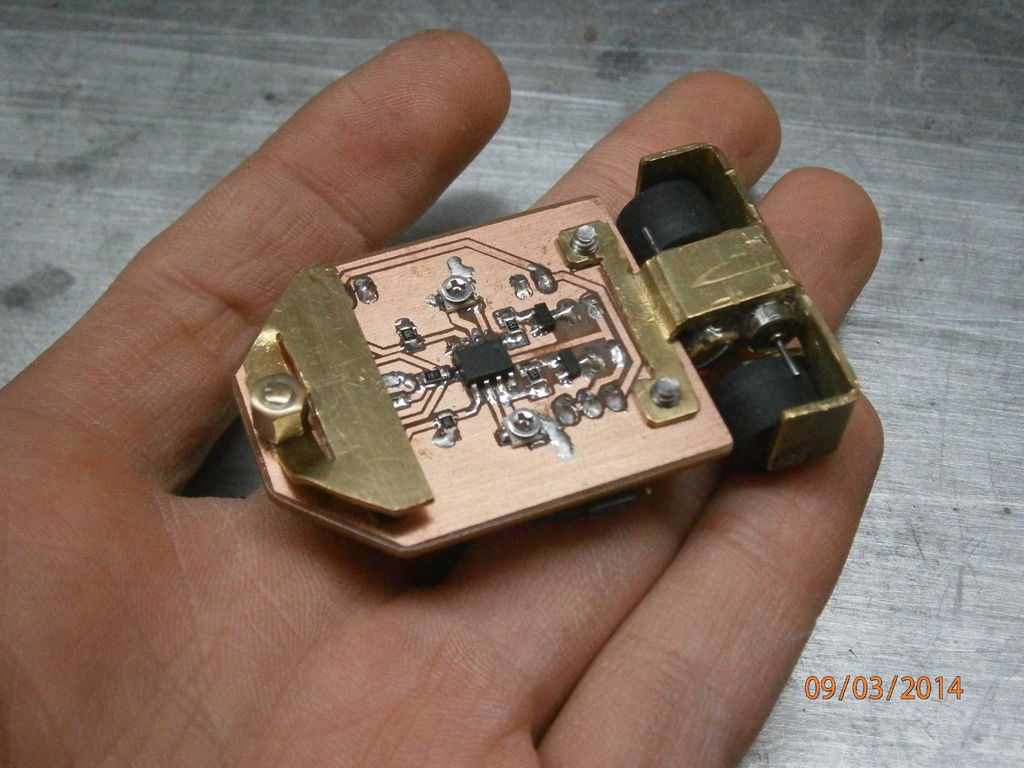
Pisikesed robotid on lahedad. Jutuks oleva aparaadi on justkui kaks täpselt samasugust skeemi. Pisike mutukas koosneb ühest infrapuna LED dioodist ja kahest fototransistorist. Kumbki fototransistor on paigutatud täitma pingejaguri rolli, reguleerides sedasi op-võimendi ühte sisendõlga. Mida rohkem infrapuna valgust fototransistori paistab seda suurem on piltlikult öeldes fototransistori juhtivus, mis tähendab, et toitepinge operatsioonivõimendi (+) sisendis suureneb. Op-võimenditega aga omakorda juhitakse väljundtransitore, mis omakorda reguleerivad mikromootorite toitevoolu. Skeem on ülilihtne, kuid samas väga efektiivne! Ka mehaaniline lahendus on hästi läbimõeldud. Op-võimendi (-) õlga on paigutatud potentsiomeetrid, millega põhimõtteliselt saab reguleerida op-võimendi võimendust ehk etteandepinge taset, kalibreerida miniroboti tundlikkust.

Mini joonejärgimisroboti skeem
Väike videoklipp
http://www.youtube.com/watch?v=slTLZbeCpo4
Täpsem, samm-sammuline ehitusjuhend on saadaval Instructable veebilehel. Hinnanguliselt maksab taolise roboti ehitamine ca 10 eurot, seega peaks olema taskukohane enamikule.
Kasutatud kirjandus:
http://hackaday.com/2014/03/28/a-mini-op-amp-based-line-following-robot/
http://www.instructables.com/id/Mini-line-tracer/?ALLSTEPS